www.moonlandings.co.uk
Apollo 15 Page 2 | Lunar Roving Vehicle
Lunar Roving Vehicle
The last of the Apollo 'spacecraft' to be designed and flown was the intriguing Lunar Rover, built by the Boeing Co Aerospace Group, at its Kent Space Center near Seattle, Washington, under contract to the NASA-Marshall Space Flight Center. Boeing's major subcontractor was the Delco Electronics Division of General Motors Corp. The Rover was a lightweight vehicle, weighing only 210 kgs (Earth weight) empty - 32 kgs on the Moon. It was battery-powered and had a potential range of about 50 kilometres. On level ground the Rover was capable of about 10 - 12 kilometres per hour and, when one added to the driving time the time spent on Rover deployment and housekeeping chores, the savings over a walking traverse was not particularly impressive. However, because the astronauts used far less oxygen, feedwater and physical energy when they were riding than they did when they were walking, use of the Rover meant that they arrived at the geology stops rested and refreshed and with a far greater stock of consumables than they would have had otherwise. In addition, the Rover could carry up to 440 kgs (Earth weight) of payload and, when one subtracted about 270 kgs for the astronauts and their life-support gear, there was still plenty of capacity for communications equipment and a generous assortment of scientific paraphernalia.
The Lunar Roving Vehicle (LRV) transported two astronauts on exploration traverses on the Moon during the Apollo 15, 16, and 17 missions. The LRV carried tools, scientific equipment, communications gear, and lunar samples.
The four-wheel, lightweight vehicle greatly extended the lunar area that could be explored by humans. The LRV could be operated by either astronaut.
The LRV was the first manned surface transportation system designed to operate on the Moon. It marked the beginning of a new technology and represented an experiment to overcome many new and challenging problems for which there was no precedent in terrestrial vehicle design and operations.
First, the LRV must be folded up into a very small package in order to fit within the tight, pie-shaped confines of Quad 1 of the lunar module which transported it to the Moon.
 The LRV of the Apollo 17 mission
The LRV of the Apollo 17 missionAfter landing, the LRV must unfold itself from its stowed configuration and deploy itself to the lunar surface in its operational configuration, all with minimum assistance from the astronauts.
The lack of an atmosphere on the Moon, the extremes of surface temperature, its lower gravity, and many unknowns associated with the lunar soil and topography imposed requirements on the LRV which had no counterpart in Earth vehicles and for which no terrestrial experience existed.
Three flight vehicles had been built, plus seven test and training units, spare components, and related equipment.
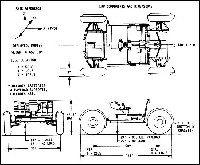
General Description
The LRV was 3,10m long ; had a 1,83m tread width; was 114 cm high; and had a 229 cm wheelbase. Each wheel was individually powered by a quarter-horsepower electric motor (providing a total of one horsepower) and the vehicle's top speed was about 13 Km/h on a relatively smooth surface.
Two 36-volt batteries provided the vehicle's power, although either battery could power all vehicle systems if required. The front and rear wheels had separate steering systems, but if one steering system failed, it could have been disconnected and the vehicle would have operated with the other system.
Weighing approximately 209 kg (Earth weight) when deployed on the Moon, the LRV carried a total payload weight of about 490 kg, more than twice its own weight. This cargo included astronauts and their portable life support systems (about 363 kg), 45 kg of communications equipment, 54 kg of scientific equipment and photographic gear, and 27 kg of lunar samples.
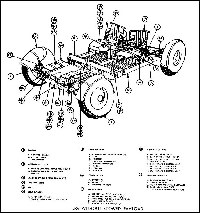
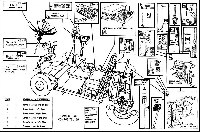
^ The LRV in greater detail
The LRV was designed to operate for 78 hours during the lunar day. It could make several exploration sorties up to a cumulative distance of 65 kilometres. Because of limitations in the astronauts' portable life support system (PLSS), the vehicle's range was restricted to a radius of about 9.5 kilometres from the lunar module. This provided a walk-back capability to the Lunar Module (LM) should the LRV become immobile at the maximum radius from the LM.
The four Rover wheels were each made of a strong wire mesh and had a chevron-shaped, metal tread that covered about fifty percent of the traction surface. When fully loaded, the Rover chassis had a clearance of about 14 inches. Rocks bigger than that had to be avoided, of course and, indeed, Cernan tried to avoid as many rocks as he could to avoid damage to the wheel. Inevitably, he couldn't avoid all of the six-inch rocks and ran over quite a few and, by the end of the third EVA, had collected a number of golf-ball-sized dents in the mesh. The dents did not noticeably degrade the Rover's performance and, indeed, because each of the wheels was driven by a separate motor and because the vehicle had, as well, both front and rear steering systems, there was little chance of a complete Rover breakdown.
The Rover was equipped with a navigation system which used counts of wheel rotations to measure the distance driven since the system was last reset. More importantly, when the wheel-rotation data were combined with heading information provided by an internal gyro, the nav system provided a range and bearing to that last point of initialization - always a point near the LM.
Setting up experiments on the Moon's surface 
The 'problem' of getting back to the LM from some distant geology station was actually a trivial one. There were outbound Rover tracks to follow and, even if the astronauts weren't retracing their outbound course, there were plenty of landmarks to lead them close enough to see the 23-foot-tall LM. For obvious reasons, the astronauts always landed in the middle of a large area of relatively flat terrain and, even if the LM was in a local low spot, all one had to do was find a bit of high ground and the glint of sunlight off the LM's foil covering would immediately catch the eye. Certainly, there was no chance of mistaking the LM for a rock and, if it was in the line of sight, it could be seen from a considerable distance. The only exception to this general rule was when the astronauts had to look directly into the low, early-morning Sun - in the direction called "up-Sun". In such a case, even had they been able to see into the bright glare, they would have been looking at shadowed surfaces on the spacecraft and might have had trouble spotting it. However, it wouldn't have taken much of a detour to get a good viewing angle and, all in all, there was virtually no chance of getting lost.
Because even the "flat country" is rolling and hummocky and everything but the LM is some shade of grey, the problem of finding anything else - say a specific crater - could be challenging. As an extreme example, on Apollo 14 Alan Shepard and Ed Mitchell walked to within twenty meters or so of the rim of Cone Crater and then, after a tiring climb and a fruitless search, eventually had to head back toward the LM without ever having actually looked into the crater. With the Rover, the problem of finding geology stops was much less dramatic.
Because the nav system measured distance and bearing relative to the LM, finding a specific crater meant that the astronauts had to know exactly where they had landed. On each of the three Rover missions, there was some initial confusion about the absolute location of the LM; but, after a while, the crews were able to unambiguously identify a crater or two. Navigation readouts at those places then helped the support people back in Houston to pin down the landing site and, thereafter, the crews could use the nav systems to drive with confidence from one place to another. The nav system was only accurate to about 100 meters; but, if there was a little remaining confusion when the crew got close to their target, they could always spend a minute or two driving around, seated comfortably, until they found the crater they were looking for.